
環鏈手扳葫蘆的總體構造如何?怎樣操作?
環鏈手扳葫蘆的總體構造如何?怎樣操作?
編輯:北京凌鷹起重 瀏覽:3735 時間:2019-07-11
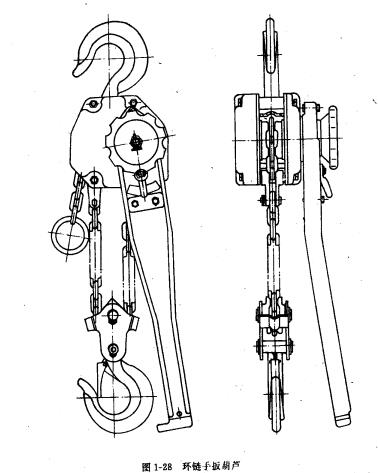
環鏈手扳葫蘆的結構如圖1-28所示,它采用一級齒輪轉動,主要有齒輪軸、齒輪、制動器、起重鏈條、鏈輪、吊鉤、操作手柄等。
操作時,先轉動手柄上的旋鈕使之指向位置牌上“上”的位置(表示吊鉤上升),然后扳動手柄,撥抓便波動撥輪,將摩擦片、棘輪、制動器座機壓緊座壓成一體,并帶動齒輪軸及齒輪一起轉動,于是鏈接的內花鍵上的起重鏈輪便帶動起重鏈條上升,重物即被平穩地起吊。當要下降重物時,轉動手柄上的旋鈕指向|“下”的位置,扳動手柄,制動器松開,重物因自重作用而下降,當停止扳動手柄時,重物就停止下降。在棘爪銷上海裝有脫離機構,空載時可以快速調整吊鉤位置。
上一條: 闡述電動葫蘆門式起重機電控系統的調整
下一條: 一種新型的環鏈電動葫蘆平衡結構介紹

