
齒輪式鏈條葫蘆的工作原理
齒輪式鏈條葫蘆的工作原理
編輯:北京凌鷹起重 瀏覽:5836 時間:2019-07-05
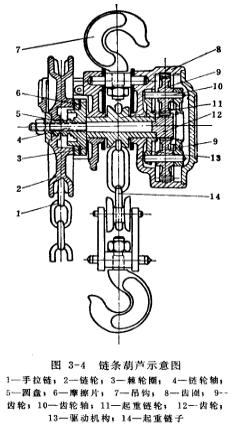
圖3-4為齒輪式手拉鏈條葫蘆。當提升重物時,手拉鏈1使鏈輪2按順時針方向轉動。鏈輪2沿著圓盤5套筒上的螺紋向里一動,而將棘輪圈3和摩擦片6都壓緊在鏈輪軸4上(鏈輪軸4與圓盤5牢固形成一體),棘輪圈3只能順時針方向轉動,棘爪在棘輪圈3上跳動發出嗒嗒之聲。鏈輪軸4右端的齒輪12帶動齒輪9(或稱行星齒輪)與固定齒圈8相嚙合,使齒輪9沿鏈輪軸4為中心順時針方向移動。同時帶動驅動機構13和起重鏈輪11轉動,使起重鏈子14上升。當不拉手拉鏈之后,重物是靠自重產生的自鎖現象和棘爪組織棘輪圈3逆時針方向轉動而停止在空中。反之,當松下重物時,手拉鏈1使鏈輪2和圓盤5分離。則鏈輪軸4右端的齒輪12帶動齒輪9與固定齒圈8相嚙合,使齒輪9沿鏈輪軸4為中心逆時針方向轉動,同時帶動驅動機構13和起重鏈輪11轉動,使起重鏈子14下降。當不拉手拉鏈之后,因鏈輪2停止轉動時,起重鏈輪11受重物自重還要繼續沿逆時針方向轉動,行星齒輪傳動機構同樣沿逆時針方向繼續轉動,使圓盤5、摩擦片6及棘輪圈3相互之間相互壓緊而產生摩擦力,棘輪圈3受棘爪阻止不能向逆時針方向轉動,于是摩擦力作用在螺紋上產生自鎖,使重物停止在空中。
上一條: 闡述電動葫蘆門式起重機電控系統的調整
下一條: 一種新型的環鏈電動葫蘆平衡結構介紹
其他新聞:

