
介紹一種可回彈的手扳葫蘆手柄
介紹一種可回彈的手扳葫蘆手柄
編輯:北京凌鷹起重 瀏覽:4223 時間:2017-12-11
手扳葫蘆是一款使用簡單,攜帶方便的手動起重工具,是通過人力手動扳動手柄借助杠桿原理獲得與負載相匹配的直線牽引力來起吊重物,現有的手扳葫蘆的手柄都是人工通過順時針和逆時針的往復扳動,來實現起吊和下放重物的,為了改善手扳葫蘆的使用方法,人們對其手柄也進行過改進,但這樣的改進只是將原來人工對手柄順時針和逆時針的來回扳動改變為人工的上下推拉動作,而并沒有減輕人工往復扳動的疲勞。
為了克服現有手扳葫蘆只能通過人力的來回扳動或上下推拉手柄才能起吊和下放重物的不足,本發明提出了一種手扳葫蘆的手柄,即:一種手扳葫蘆的回彈手柄。
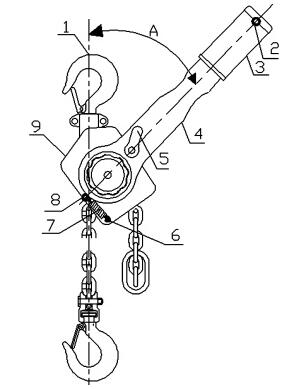
一種手扳葫蘆的回彈手柄,其包括手扳葫蘆本體、回彈手柄和拉簧,其中的回彈手柄是在手扳葫蘆的手柄兩側或頂端或在其長度方向的中心線上固定有安裝環或柱或孔,在回彈手柄的下端裝有護套,在護套上開有通孔;拉簧的一端固定在回彈手柄上的安裝環或柱或孔上,拉簧的另一端固定在回彈手柄一側手扳葫蘆本體上或手扳葫蘆本體的罩殼上,或通過支架(柱)安裝在回彈手柄一側手扳葫蘆本體上或手扳葫蘆本體的罩殼上,使回彈手柄在長度方向的中心線與手扳葫蘆本體的上吊鉤之間的夾角不大于90度,且護套上的通孔內固定有滾動軸承。
功能是這樣實現的:普通手扳葫蘆在懸掛后,其手柄因受自身的重力作用是下垂的,即:普通手扳葫蘆在懸掛后,其手柄在長度方向的中心線與上吊鉤之間的夾角為180度;本發明的手扳葫蘆的回彈手柄在懸掛后,其回彈手柄因受到拉簧的作用是上翹的,即:手扳葫蘆的回彈手柄在懸掛后,其回彈手柄在長度方向的中心線與上吊鉤之間的夾角小于90度。
因普通手扳葫蘆在懸掛后,其手柄在長度方向的中心線與上吊鉤之間的夾角為180度,所以,普通手扳葫蘆在起吊和下放重物時必須由人工順時針和逆時針的往復扳動手柄,才能完成手扳葫蘆起吊和下放重物的作業;而本發明的手扳葫蘆的回彈手柄在長度方向的中心線與上吊鉤之間的夾角不大于90度,所以,帶有回彈手柄的手扳葫蘆在起吊和下放重物時只須由人工順時針或逆時針扳動手柄,即可完成起吊和下放重物的作業,這樣就簡化了人工操作過程,由此減輕了人工往復扳動的疲勞。
此外,當普通手扳葫蘆的懸掛高度超過人體高度時,將會導致人工無法操作的情況;而本發明的手扳葫蘆的回彈手柄,可以在回彈手柄護套上的通孔內安裝一根繩索或金屬拉鉤,人工只須向下拉動繩索或金屬拉鉤即可完成重物的起吊和放下作業;因此,本發明的手扳葫蘆的回彈手柄不但減輕了人工的疲勞而且還擴大了手扳葫蘆的應用范圍。
上一條: 闡述電動葫蘆門式起重機電控系統的調整
下一條: 一種新型的環鏈電動葫蘆平衡結構介紹
其他新聞:

