
電動葫蘆安裝過程中電路方面該如何操作?
電動葫蘆安裝過程中電路方面該如何操作?
編輯:北京凌鷹起重 瀏覽:5015 時間:2018-10-06
電動葫蘆和手拉葫蘆最大的區別是用電路的原理才實現機械的運轉,那么在安裝過程中,最重要的一點就是電路的安裝,那么倒是是如何操作的,下面北京凌鷹就為您做出最詳細的分析:
電動葫蘆和手拉葫蘆最大的區別是用電路的原理才實現機械的運轉,那么在安裝過程中,最重要的一點就是電路的安裝,那么倒是是如何操作的,下面北京凌鷹就為您做出最詳細的分析:
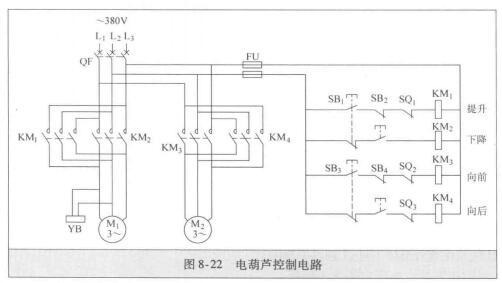
主電路用斷電路QF作短路保護;接觸器KM1、KM2控制提升電動機M1、KM3、KM4控制進行點擊M2的正反向運行,它們都是靠改變施加于電動機三相電源的相序實現正轉或反轉的;YB為電磁制動器,它裝在提升電動機M1的端部,以保證吊鉤的準確定位。
控制電路采用電動機的電動控制電路,上面兩條之路分別為提升、下降控制,兩支路由懸掛式符合按鈕SB1、SB2來控制起停,SQ1作上限位開關,用于提升的終端保護;下面兩條支路分別為行車的向前、向后移動控制,它們由懸掛式符合按鈕SB3、SB4來控制起停,SQ2、SQ3分別是前、后移動限位開關,作水平移動的終端保護。熔斷器FU用作短路保護。
前進控制:按下符合按鈕SB3,SB3常閉觸頭先斷開,保證接觸器KM4不會得電吸合,SB3常開觸頭后閉合,接觸器KM3得電吸合,行進電動機M2得電起動。移動至規定位置時,松開SB3,KM3斷電釋放,M2停機。如操作者操作失誤或由于某種原因導致SB3觸頭短路,行進到終端位置時,限位開關SQ2斷開,接觸器KM3斷電釋放,電動機準確停止。
同理,操作者可自行分析后退控制和升、降控制。
電葫蘆的安裝,在對面墻的兩main,用工字鋼架設導軌,在導軌上安裝一個操作吊鉤,然后用按鈕盒在地面上即可進行上下左右移動控制。它是工廠常用的移動工具之一。
上一條: 闡述電動葫蘆門式起重機電控系統的調整
下一條: 一種新型的環鏈電動葫蘆平衡結構介紹
其他新聞:

